

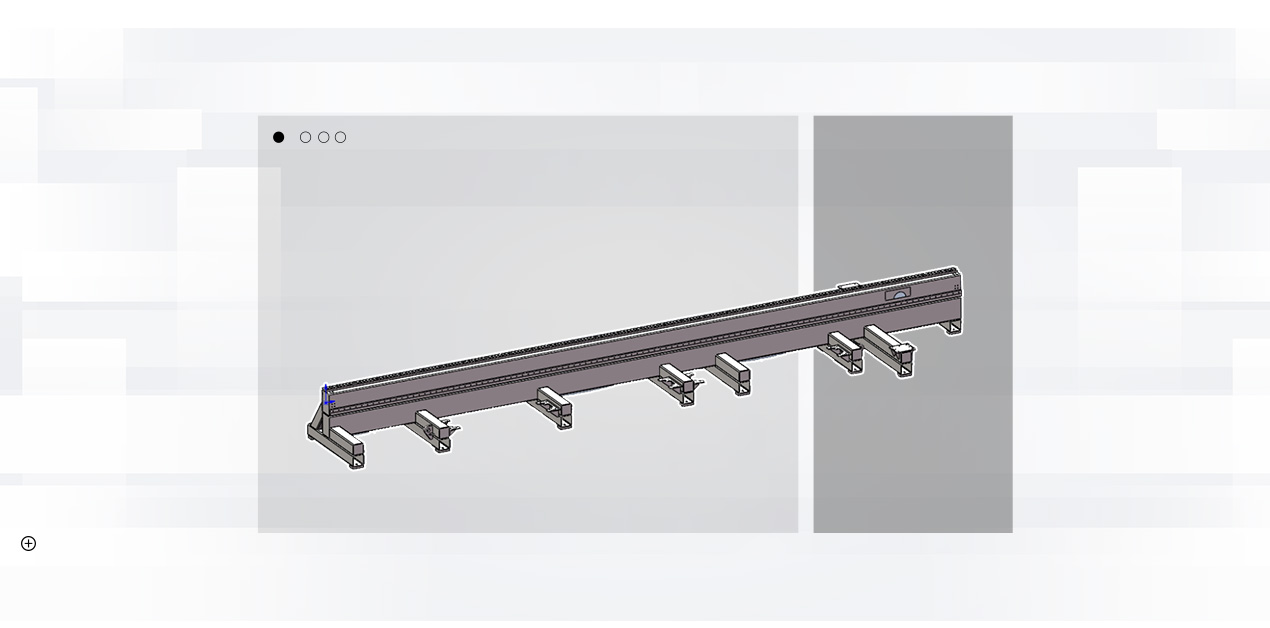
د غاړې ځړول شوی جوړښت - یوه ټوټه - ویلډ شوی بستر
بستر د غاړې ځړول شوی جوړښت او یو ټوټه ویلډ شوی بستر غوره کوي، کوم چې د داخلي فشار له منځه وړلو لپاره انیل شوی دی. د سخت ماشین کولو وروسته، د ماشین کولو پای ته رسیدو دمخه د وایبریشن عمر ترسره کیږي، په دې توګه د ماشین وسیلې سختۍ او ثبات خورا ښه کوي او د ماشین وسیلې دقت ډاډمن کوي. د AC سرو موټرو ډرایو د عددي کنټرول سیسټم لخوا کنټرول کیږي، او چک د موټرو چلولو وروسته د Y لوري کې متقابل حرکت احساسوي، د چټک حرکت او تغذیه حرکت احساسوي. د Y-axis ریک او خطي لارښود ریل دواړه د لوړ دقیق محصولاتو څخه جوړ شوي دي، کوم چې په مؤثره توګه د لیږد دقت تضمینوي؛ د سټروک په دواړو سرونو کې د حد سویچونه کنټرول شوي، او په ورته وخت کې یو سخت حد وسیله نصب شوی، کوم چې په مؤثره توګه د ماشین وسیلې حرکت خوندیتوب ډاډمن کوي؛ د ماشین وسیله سمبال ده د اتوماتیک غوړولو وسیله د بستر حرکت کونکو برخو ته په منظم وقفو کې غوړ غوړ اضافه کوي ترڅو ډاډ ترلاسه شي چې حرکت کونکي برخې په ښه حالت کې پرمخ ځي، کوم چې کولی شي د لارښود ریلونو، ګیرونو او ریکونو خدمت ژوند ښه کړي.
د مخکینۍ تغذیه کولو وسیله
د مخکینۍ تغذیه کولو وسیله کې د ملاتړ پلیټ شامل دی چې د هوا سلنډر لخوا کنټرول کیږي، کوم چې د پایپ ملاتړ کوي کله چې پرې شوی پایپ اوږد وي او د لوېدو مخه یې نیسي.
کله چې کاري ټوټه پرې کېږي، پورته شوی ملاتړی سلنډر د پایپ د ملاتړ لپاره د ملاتړ پلیټ ملاتړ کوي او د لوېدو مخه نیسي. کله چې کاري ټوټه پرې شي، پورته شوي ملاتړی سلنډرونه ټول بیرته اخیستل کیږي، او کاري ټوټه د خالي کولو پلیټ ته راښکته کیږي او د ذخیره کولو ځای ته سلایډ کیږي. د سلنډر عمل په اتوماتيک ډول د سیسټم لخوا کنټرول کیږي.
مخکینۍ برخه هم د تعقیب ډول او لاسي تنظیم کولو ډول ویشل شوې ده.

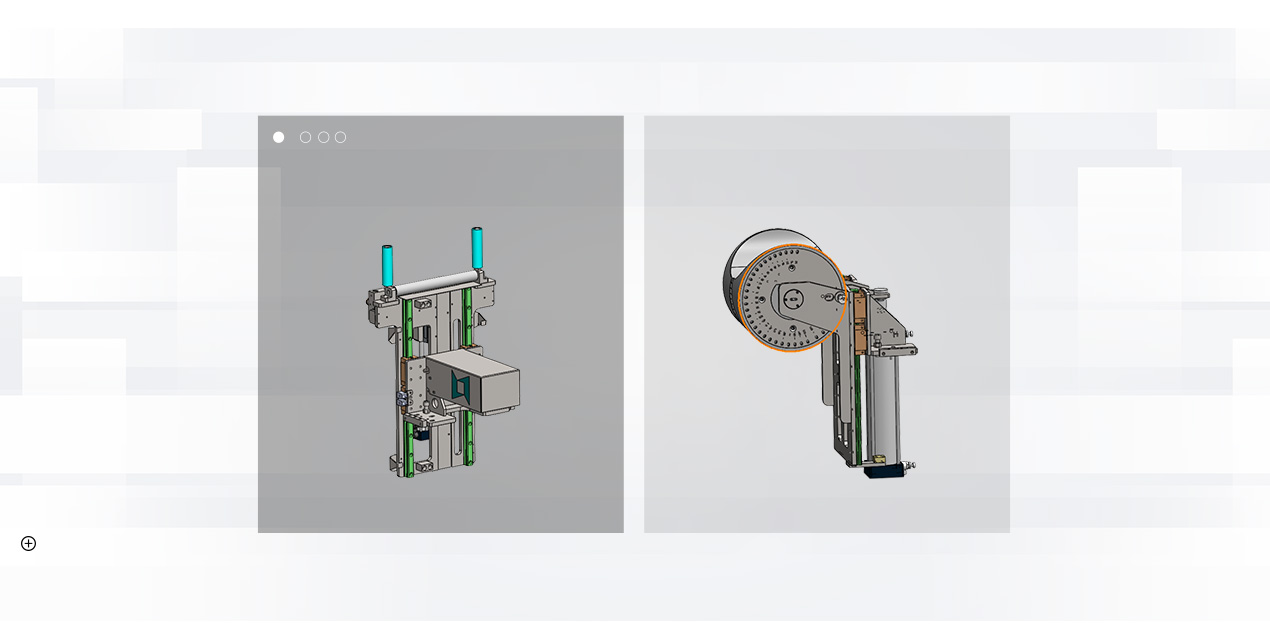
د ملاتړ میکانیزمونه
په بستر کې د ملاتړ میکانیزمونو درې سیټونه نصب شوي، او دوه ډولونه شتون لري:
۱. د تعقیب ملاتړ د یو خپلواک سرو موټور لخوا کنټرول کیږي ترڅو پورته او ښکته حرکت وکړي، په عمده توګه د اوږد پرې شوي پایپونو (د کوچنیو قطرونو سره پایپونو) د ډیر خرابوالي لپاره د تعقیب ملاتړ ترسره کولو لپاره. کله چې شاته چک اړونده موقعیت ته حرکت وکړي، نو مرستندویه ملاتړ د مخنیوي لپاره ښکته کیدی شي.
2. د متغیر قطر څرخ ملاتړ د سلنډر لخوا پورته او ښکته کیږي، او دا په لاسي ډول د مختلفو پیمانه موقعیتونو سره تنظیم کیدی شي ترڅو د مختلفو اندازو پایپونو ملاتړ وکړي.
چک-پارټ
چک په مخکینۍ او شاته دوه نیوماتیک بشپړ سټروک چکونو ویشل شوی، چې دواړه کولی شي په Y لوري حرکت وکړي. شاته چک د پایپ د کلمپ کولو او تغذیه کولو مسؤلیت لري، او مخکینۍ چک د بستر په پای کې د کلمپ کولو موادو لپاره نصب شوی. مخکینۍ او شاته چکونه په ترتیب سره د سرو موټرو لخوا پرمخ وړل کیږي ترڅو همغږي گردش ترلاسه کړي.
د دوه ګوني چکونو د ګډ کلیمپینګ لاندې، د لنډ لکۍ پرې کول احساس کیدی شي، او د خولې لنډ لکۍ کولی شي 20-40 ملي میتر ته ورسیږي، پداسې حال کې چې د اوږدې لکۍ لنډ لکۍ پرې کولو ملاتړ کوي.
د TN لړۍ پایپ پرې کولو ماشین د چک حرکت او مخنیوي طریقه غوره کوي، کوم چې کولی شي په دوامداره توګه د دوه چکونو سره پرې کول احساس کړي، او د پایپ د ډیر اوږد او بې ثباته کیدو لامل نه شي، او دقیقیت یې کافي نه وي.

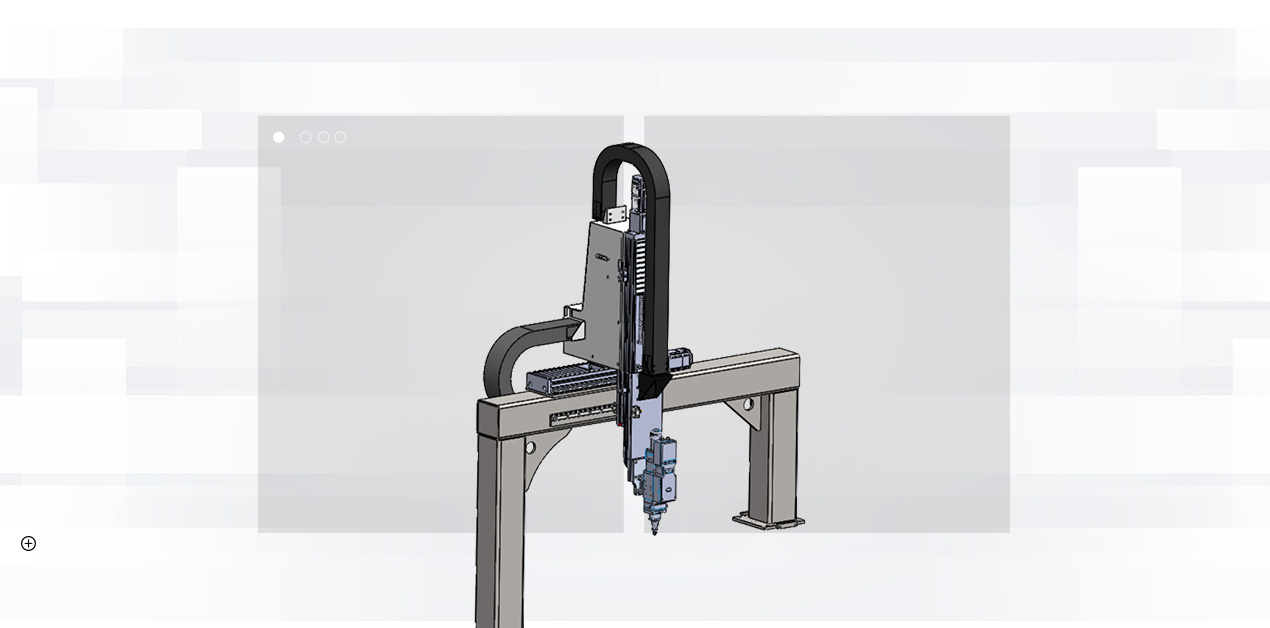
د محور وسیله
د ایکس محور وسیلې کراس بیم د ګینټري جوړښت غوره کوي، کوم چې د مربع ټیوب او فولادو پلیټ ترکیب لخوا ویلډ شوی. د ګینټري برخه په بستر کې ټاکل شوې ده، او ایکس محور د سرو موټرو لخوا پرمخ وړل کیږي ترڅو ریک او پنین چلوي ترڅو د X لوري کې د سلایډ پلیټ متقابل حرکت احساس کړي. د حرکت په پروسه کې، د محدودیت سویچ د سیسټم عملیاتو خوندیتوب ډاډمن کولو لپاره موقعیت محدودولو لپاره سټروک کنټرولوي.
په ورته وخت کې، د X/Z محور خپل د ارګان پوښ لري ترڅو داخلي جوړښت خوندي کړي او غوره محافظت او دوړو لرې کولو اغیزې ترلاسه کړي.
د Z-axis وسیله په عمده توګه د لیزر سر پورته او ښکته حرکت درک کوي.
د Z محور د CNC محور په توګه کارول کیدی شي ترڅو خپل انټرپولیشن حرکت ترسره کړي، او په ورته وخت کې، دا د X او Y محورونو سره وصل کیدی شي، او د مختلفو حالتونو اړتیاو پوره کولو لپاره د تعقیب کنټرول ته هم لیږدول کیدی شي.
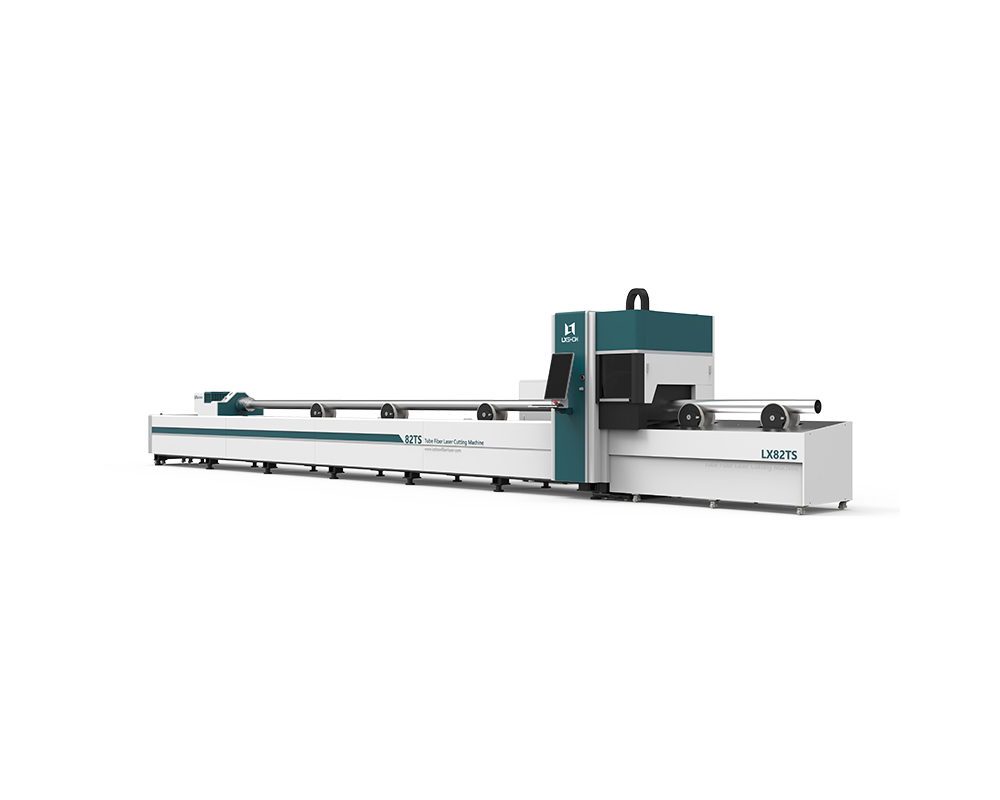
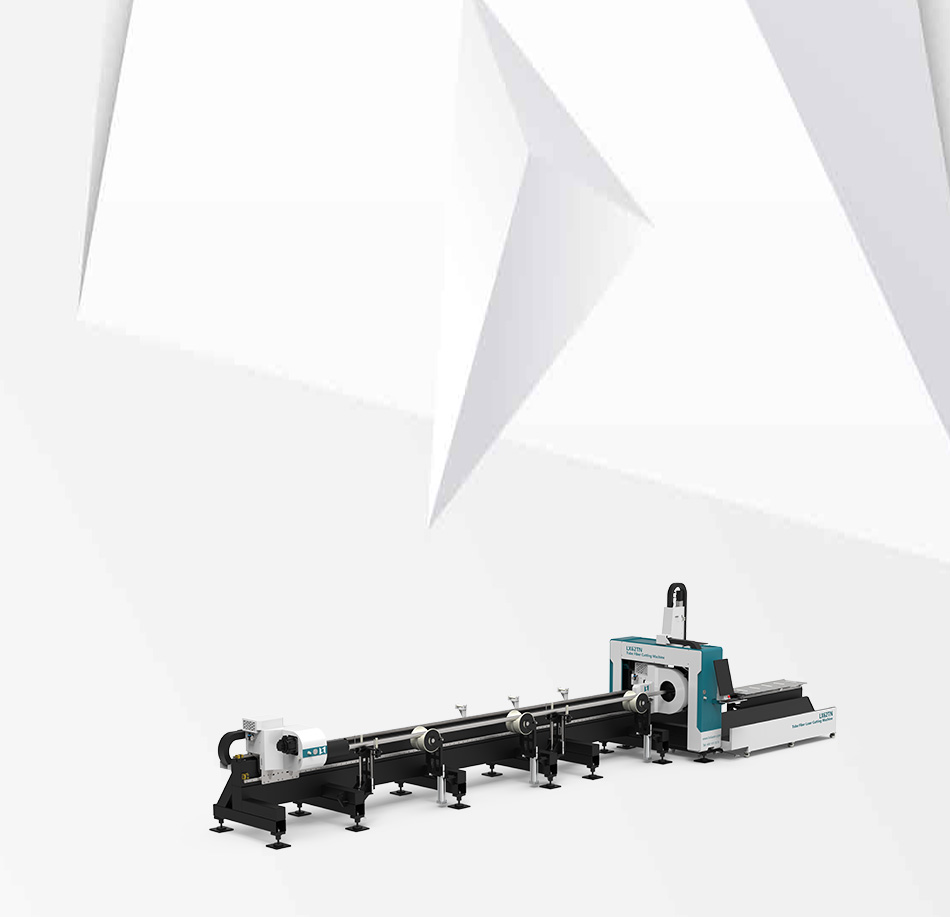
د فلزي پایپ فایبر لیزر پرې کولو ماشین 62TN ګټې